О нас
§ 1. О группе компаний
1.1. Состав
- ООО «Нейроботикс»
Разработка контрактных проектов, разработка и производство исследовательского оборудования, основана в 2004 году. С 2016 году работает в рамках Национальной Технологической Инициативы (НТИ) по направлению Нейронет, сегмент Нейромедтехники. Лидер проекта «Ассистивные технологии с нейроуправлением». Импортозамещение оборудования для фарм индустрии. - ООО «Вежливые роботы»
Антропоморфная робототехника и разработка программного обеспечения, основана в 2016 году. - ООО «Нейроассистивные технологии»
Производство нейрогарнитур и реабилитационного оборудования, резидент Сколково, основана в 2018 году. - ООО «Нейроботикс Трейдинг»
Поставка исследовательского оборудования в области нейрофизиологии, психофизиологии, физиологии, поведения человека и животных в Университеты и НИИ, основана в 2007 году.
1.2. Компетенции
- Нейроинтерфейсы и обработка биологических сигналов, в том числе ЭЭГ, ЭКГ, ЭМГ
- Видеоаналитика, включая распознавание и трекинг объектов
- Анализ лица по изображению, включая эмоции и мимику
- Анализ речи, включая автоматическую артикуляция для роботов и распознавание звуков для логопедии
- Разработка плат управления двигателями
- Разработка схемотехнических решений
- Собственное производство, содержащее в своём арсенале токарные и фрезерные станки с ЧПУ, 3D-принтеры, лазерные резчики и термопластавтоматы
- Создание пресс-форм для литья из пластика
- Создание моделей из силикона, в том числе лиц роботов с портретным сходством
- Создание программных продуктов управления роботами, состоящих из мультимодальных сенсоров и актуаторов
- Создание специализированных сайтов
- Создание облачных высоконагруженных баз данных и средств аналитики
- Создание кроссплатформенных приложений
- Разработка и изготовление конструкций любой сложности из пластика, алюминия и стали
- Напыление Ag/AgCl на сухие электроды
- Контрактные и аутсорс проекты
- Ведение проектов
§ 2. Физиология человека
2.1. Нейрогарнитура NeuroPlay


Линейка беспроводных усилителей биосигналов для ЭЭГ. Опрашивает 6-8 каналов с частотой 125 Гц. Имеет сухие электроды, покрытые хлор-серебром (Ag/AgCl). Работает до 24 часов в режиме съёма и взаимодействует по Bluetooth с любыми операционными системами. Изготавливается на собственном производстве (Зеленоград и Долгопрудный).
Год разработки: 2016 — по настоящее время
2.2. ПО NeuroPlay
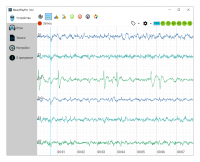
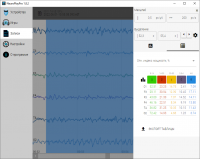
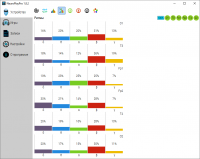
Кроссплатформенный программный продукт, предназначенный для работы с нейрогарнитурами NeuroPlay. Осуществляет подключение к гарнитурам; расчет спектров, ритмов, метаиндексов, дискретных ментальных состояний; запись, просмотр и анализ ЭЭГ-данных. Имеет открытый кроссплатформенный API+SDK, единый для всех настольных и мобильных операционных систем. Позволяет использовать нейроигры и когнитивные тесты braincomputer.io.
Год разработки: 2015 — по настоящее время
Нейроуправление с помощью ритмов мозга
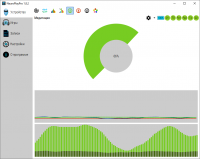
Алгоритм преобразования ритмов мозга в управляющее воздействие. Используется для нейробиоуправления (БОС-тренировок), нейропилотирования (управления виртуальными и физическими объектами), оценки ментальной и психоэмоциональной оценки.
Год разработки: 2012 — по настоящее время
Распознавание дискретных ментальных состояний


Нейросетевой алгоритм, классифицирующий по записанным состояниям ЭЭГ в реальном времени. Используется для нейропилотирования, а именно моторизованными инвалидными колясками, экзоскелетами (включая экзоскелеты нашего производства), виртуальными объектами.
Этот алгоритм позволил завоевать 2 место (2021) и 4 место (2016) в международных соревнованиях Cybathlon (в категории BCI) в Цюрихе, Швейцария.
Год разработки: 2012 — по настоящее время
2.3. Портал с нейроиграми braincomputer.io
Облачный сервер и веб-портал, предназначенный для проведения БОС-тренировок и когнитивных тестов.
В базе данных более 900 клиентов и более 13 000 записей сессий с биологической обратной связью.
2.4. StimPack
Кроссплатформенный движок для создания интерактивных слайдов, отображаемых в том числе в браузере. Используется для создания нейроигр, когнитивных тестов и комплексов нейротренингов. В данный момент дорабатывается для использования вместо импортных аналогов в рамках импортозамещения, в роли платформы для создания и проведения когнитивных, сенсомоторных тестов и сессий с биологической обратной связью.
Год разработки: 2019 — по настоящее время
2.5. NeuroForsage
Автоматизированные нейротренинги, основаны на сочетании движка StimPack, нейрогарнитуры NeuroPlay и сервера braincomputer.io. В базе данных более 600 клиентов и более 20 000 записей.
Год разработки: 2020 — по настоящее время
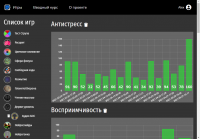
2.6. Курс самостоятельной нейрокоррекции NeuroV

Отдельный курс нейротренингов для самостоятельной нейрокоррекции психоэмоциональных и когнитивных нарушений (в том числе, осложнений после COVID-19). К таким нарушениям относятся: депрессия, апатия, бессонница, нарушение памяти и мышления, раздражительность.
В базе данных более 200 клиентов и более 8 000 записей.
Год разработки: 2021 — по настоящее время
2.7. Физиобелт


Комплекс регистрации и анализа ЭКГ человека и лабораторных животных. 1 канал 1000 Гц, до 24 часов в режиме съёма, анализ вариабельности сердечного ритма по кардиоинтерваллограмме (R-R).
Год разработки: 2016 — по настоящее время
2.8. EmoDetect

Алгоритм и программное обеспечение для распознавания лиц, нахождения характеристических точек лица, определения мимических двигательных единиц (более 40 AU) и классификации эмоций (гнев, отвращение, радость, удивление, грусть) по изображениям или видео в реальном времени. Существуют режимы пакетной и потоковой обработки. Обеспечивает совместную работу с трекингом глаз (стороннего производителя), стимуляционным пакетом (собственного производства) и выполняет соответствующий анализ направления взора. Алгоритм используется в составе робототехнического ПО RoboStudio и xoRDE.
Год разработки: 2015 — по настоящее время
2.9. Когниграф
Нейросетевой классификатор состояний и исследовательское программное обеспечение по многоканальной ЭЭГ (до 128 каналов). Позволяет локализовать источники, найти корреляцию между стимулами и активными зонами мозга, классифицировать ментальные состояния и, в частности, обратно декомпозировать и визуализировать то, что человек видит (с предварительным обучением).
Год разработки: 2019 — по настоящее время
2.10. Neocortex
Профессиональное программное обеспечение для обработки биосигналов человека (ЭЭГ, ЭКГ, ЭМГ, реовазограмма, КГР и другие). Работает с биоусилителями российского и иностранного производства, позволяет в реальном времени производить спектральный, вейвлетный и дипольный анализ, работать с вызванными потенциалами. Используется в клиниках и исследовательских центрах. Имеет встроенный стимуляционный пакет.
Год разработки: 2004 — 2012
§ 3. Физиология животных
3.1. Шелтер
Предназначен для автоматизированного определения когнитивных функций (обучаемость и память) лабораторных животных на основе реакции избегания электрокожного раздражителя. АПК позволяет проводить тестирование для мышей или крыс. Отрабатываемые парадигмы: условная реакция пассивного («тёмная-светлая камера», «step-down») и активного избегания, конфликтные ситуации по Вогелю и предпочтение места. Оснащён электрической сеткой, ИК-камерой, световыми и звуковыми раздражителями. Конструкция позволяет менять стенки (тёмные, прозрачные, с кормушкой/поилкой). Возможна установка внутренней стенки с норовидным отверстием, в том числе с моторизованной дверцей. Собственное производство.
Год разработки: 2012 — по настоящее время
3.2. Ротарод
Комплекс предназначен для определения двигательно-координационных нарушений по способности мелких лабораторных животных (крыс и мышей) удерживаться на вращающемся барабане.
Используется для регистрации двигательных нарушений, выносливости, состояния мотивации. Позволяет дозировать физическую нагрузку.
Собственное производство в России.
Год разработки: 2013 — по настоящее время
3.3. Систола
Аппаратно-программный комплекс для неинвазивного измерения давления с хвоста крысы. Встроенная помпа автоматически нагнетает давление в хвостовой манжете до прекращения пульсаций кровотока, a затем, снижая давление, измеряет систолическое и диастолическое давление на основе показаний инфракрасного датчика пульса, надеваемого на хвост. Собственное производство в России.
Год разработки: 2015 — по настоящее время
3.4. Минотавр
Программа для записи с камер (включая 3D-камеры) и анализа видеофайлов для комплексной оценки поведения грызунов (перемещений и действий) в лабораторных исследованиях с использованием произвольного вида лабиринтов и установок. В анализ входит: регистрация треков, тепловых карт, стоек, выглядываний; разбиение лабиринта на произвольные зоны; оценка времени пребывания в зонах, времени активности и пассивности в них, количество посещений зон, пройденного пути, средней скорости перемещения за выбранное время и за время в активном состоянии; расчёт обобщенной статистики по нескольким видеофайлам, с возможностью изменения условий: зон, временных промежутков и т.д.
Год разработки: 2018 — по настоящее время
§ 4. Роботы
4.1. Антропоморфные роботы с силиконовым лицом
Пушкин, Алиса, Бетси, Тьюринг
Роботы с силиконовым лицом с портретным сходством и подвижной мимикой (до 20 актуаторов). Модель Алиса получена путём копирования лица реального человека. Самая популярная модель — Пушкин. Работают под управлением RoboStudio, помимо мимического управления обладают речевым интерфейсом и чат-ботом, умеют следить за лицом человека, распознавать лица и эмоции.
Год разработки: 2010 — по настоящее время
Робот для симуляции синдромов инсульта
Специальная версия робота с портретным сходством, имеет подвижный язык и управляемый размер зрачка. Создан для симуляции синдромов инсульта и речевого взаимодействия с пациентами для обучения студентов медицинских ВУЗов.
Год разработки: 2019 — по настоящее время
Стоматологический робот
Специальная версия робота с портретным сходством с заменяемой челюстью и речевым интерфейсом для отработки навыков стоматологов.
Год разработки: 2021 — по настоящее время
4.2. Робот с проекционным лицом
Особенностью является «лицо», представляющее собой антропоморфную поверхность, куда проецируется произвольная трёхмерная модель лица. Имеет 2 степени подвижности шеи, встроенный массив микрофонов (включая узконаправленный), звукопередающую систему и аккумулятор для восьмичасовой работы. Работает под управлением RoboStudio. Возможно применение в качестве логопеда.
Год разработки: 2018 — по настоящее время
4.3. RoboStudio
Программное обеспечения для всей линейки роботов собственной разработки. Среди компонентов: управление мимикой силиконового лица и проекционной трёхмерной моделью лица; генерация плоского лица на экране; распознавание и генерация речи (с автоматической артикуляцией); встроенный чат-бот; управление другими двигателями (руки-манипуляторы, пневмоприводы, колеса); детекцией и распознавания лиц и эмоций.
Год разработки: 2010 — по настоящее время
4.4. xoRDE
Кроссплатформенная распределённая операционная среда разработки роботов. Каждый компонент представляет собой либо подгружаемую библиотеку, либо отдельную программу. Обмен сообщениями осуществляется посредством специального протокола ONB, работающем одинаково быстро и в высокопроизводительных платах управления двигателями и в верхнеуровневых модулях (например, для передачи видеопотока) по модели издатель-подписчик с минимальным футпринтом. Разработана в рамках Лаборатории Нейроробототехники МФТИ.
Год разработки: 2018 — по настоящее время
4.5. Манипулятор РобоКом
Ассистивный манипулятор прикроватного или мобильного размещения. Работает, в том числе, от речевого интерфейса, нейроинтерфейса и трекинга глаз. Разработан и произведён на собственных мощностях.
Год разработки: 2018 — 2021
§ 5. Реабилитация
5.1. Exonero
Реабилитационный комплекс для восстановления моторной активности кисти после инсульта. Состоит из экзоскелета кисти, активной системы поддержки предплечья, ЭМГ-датчика, электростимулятора мышц (ФЭС), нейроинтерфейса (NeuroPlay) и транскраниального электрического стимулятора (стороннего производства). Программное обеспечение состоит из: базы данных, ряда игр для локомоторного взаимодействия и когнитивных тестов.
Год разработки: 2018 — по настоящее время
5.2. Робот-логопед
Программный продукт и набор тренингов для логопедической коррекции речевых нарушений после инсульта, таких как алалия и афазия разной степени тяжести. Состоит из ряда ранжированных по степени речевого нарушения тренингов (разработанных совместно с клиниками академика Лядова): дыхательная и мимическая гимнастика, произнесение звуков, слогов, слов и фраз (с распознаваем речи). ПО содержит базу данных пациентов и их персонализированных тренировок. Начало тренировки осуществляется по распознаванию лица пациента. Возможно использование для проекционного робота и в виде отдельной программы.
Год разработки: 2018 — по настоящее время
5.3. Экзокисть для реабилитации на дому
Год разработки: 2021 — по настоящее время
5.4. Экзоскелет нижних конечностей
Экзоскелет для вертикального хождения для лиц с парезом ног. Управляется сценарно по кнопке или от нейроинтерфейса. Позволил завоевать 7 место в категории Exoskeleton Race на Cybathlon 2016 (Цюрих). Собственное производство всех деталей и схемотехники.
Год разработки: 2016.
§ 6. Аутсорс
OmegaWave
Комплекс полиметрической оценки здоровья спортсменов по ЭКГ.
Роль: разработка приложения с базой данных и профессиональным мультимодальным анализом ЭКГ.
Заказчик: Omegawave Ltd, Финляндия
Год разработки: 2012
Спартан-300
Комплекс по регистрации и выявлению подозрительных лиц в потоке.
Роль: разработка программного обеспечения по детекции и классификации подозрительных лиц, создание конструкций с камерами и сенсорами.
Заказчик: Международный фонд технологий и инвестиций
Год разработки: 2013
Управление квадрокоптером с помощью мозговых команд
Разработка нейроинтерфейса для фонового управления квадрокоптером и системы позиционирования квадрокоптера с помощью камер.
Заказчик: ФПИ
Год разработки: 2015-2016
§ 7. Патенты и РИДы
| ПО ПЭВМ | ||
|---|---|---|
| Название ПО | Номер свидетельства о регистрации, дата получения | Правообладатель |
| Биовин | № 2019611178 от 23.01.2019 | ООО «Вежливые Роботы» |
| ЭмоДетект | № 2018612628 от 21.02.2018 | ООО «Нейроботикс» |
| Кортекс | № 2018612631 от 21.02.2018 | ООО «Нейроассистивные технологии» |
| Минотавр | № 2018613484 от 15.03.2018 | ООО «Нейроботикс» |
| НейроПлэй-РГ | № 2019612725 от 26.02.2019 | ООО «Нейроассистивные технологии» |
| РобоСтудио | № 2018663534 от 30.10.2018 | ООО «Нейроботикс» |
| Когниграф | № 2020613238 от 12.03.2020 | ООО «Нейроассистивные технологии» |
| Физиобелт | № 2021664019 от 23.08.2021 | ООО «Нейроботикс» |
Товарные знаки | ||
| Название товарного знака | Номер свидетельства о регистрации, дата получения | Правообладатель |
| НейроПлэй | Свидетельство о регистрации № 732617 от 08.02.2019 | ООО «Нейроассистивные технологии» |
| Робот «Алиса Зеленоградова» | Свидетельство о регистрации № 800874 от 09.03.2021 | ООО «Вежливые роботы» |
| Нейро-V | № 2021725430 | ООО «Нейроассистивные технологии» |
Патенты РФ | ||
| Название патента | Номер свидетельства о регистрации, дата получения | Правообладатель |
| Устройство пронации-супинации кисти руки | Патент RU 187968 | ООО «Нейроассистивные технологии» |
| Модуль большого пальца экзоскелета кисти руки | Патент RU 186619 | ООО «Нейроассистивные технологии» |
| «Способ формирования системы управления мозг-компьютер» | Патент РФ на изобретение № 2704497 | ООО «Нейроботикс» |
| «Сухой электрод для нейрокомпьютерного интерфейса» | Патент RU 182 738 | ООО «Нейроассистивные технологии» |
Заявки PCT и РФ | ||
| Предмет заявки | Номер заявки | Правообладатель |
| PCT заявка: «Система коммуникации для лиц с нарушением слуха и зрения» | Номер заявки 2224 | ООО «Нейроботикс» АНО «Сенсор-Тех» |
| PCT заявка: «Способ проведения когнитивных исследований с использованием системы нейровизуализации и механизма обратной связи» | PCT/RU 2018/000882 от 27.12.2018 | ООО «Нейроботикс» |
| PCT заявка: «Метод распознавания жестов руки на основе обработки ЭМГ-сигнала для управления протезирующим устройством» | Общий № № 09027 | ООО «Нейроассистивные технологии» |
| PCT заявка: «Способ тренировки моторных функций кисти руки с обратной связью на основании обработки сигнала электромиографии» | Общий № № 09027 | ООО «Нейроассистивные технологии» |
| PCT заявка: «Способ определения категории визуального объекта, наблюдаемого человеком, на основе распознавания сигнала электроэнцефалографии» | Общий № № 09027 | ООО «Нейроассистивные технологии» |
| PCT заявка: «Способ неинвазивной стимуляции нейропластических процессов у пациентов после инсульта с помощью реабилитационного комплекса „Нейротренажёр“ с управлением по электромиографическому сигналу, через интерфейс мозг-компьютер с кинестетической обратной связью и функциональной электронейромиостимуляцией» | ООО «Нейроботикс» ФГНБУ НЦ Неврологии АН РФ |
|
| PCT заявка: «Способ увеличения эффективности реабилитации двигательных нарушений в руке у пациентов после инсульта с помощью транскраниальной электрической стимуляции постоянным током в комбинации с функциональной электростимуляцией» | ООО «Нейроботикс» ФГНБУ НЦ Неврологии АН РФ |
|
| PCT заявка: «Захватное устройство и способ его работы» | P3145PC06 | ООО «Нейроассистивные технологии»
МФТИ |
| PCT заявка: «Способ получения объектов трёхмерной схемы» | P3147PC12 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Держатель манипулятора» | P3146PC09 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Система манипулирования объектами» | P3144PCO1 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Способ определения направления взгляда». | Р3156РСО8 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Устройство определения направления взгляда» | Р3155РСО7 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Сервопривод» | РЗ18ЗРСОЗ | ООО «Нейроассистивные технологии»
МФТИ |
| PCT заявка: «Способ управления роботизированным манипулятором» | Р3181РС11 | ООО «Нейроассистивные технологии»
МФТИ |
| PCT заявка: «Датчик крутящего момента» | Р3184РСО4 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Способ управления роботизированным манипулятором» | РЗ179РС10 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Способ выполнения манипуляций с объектом» | Р3182РС13 | ООО «Нейроассистивные технологии» МФТИ |
| PCT заявка: «Устройство интерфейса мозг-компьютер для интеграции с системами виртуальной реальности» | RU2021/000616 | ООО «Нейроботикс» |
| PCT заявка: «Экзоскелет кисти для пассивных и активных тренировок при порезах | RU2021/000617 | ООО «Нейроботикс» |
§ 8. Публикации
- Musha T, Ivanov V, Konyshev V. — Source estimation in the human brain from EEG based on the SSB Head Model // Methods Inf Med., 1994 Mar, 33(1), 120-2
- Славуцкая А. В., Шевелев И. А., Конышев В. А., Шараев Г.А. — Различия в характеристиках зрительных вызванных потенциалов мозга человека на изображения полосок и крестообразных фигур // Российский физиологический журнал И. М. Сеченова, 2004, том 90, № 8 (приложение), стр. 226-237
- Фролов А.А., Михайлова Е.С., Прокопенко Р.А., Шевелев И.А., Славуцкая А.В., Конышев В.А. — Роль фильтрации в локализации дипольных источников вызванных потенциалов в мозге человека: эксперимент и модель // Журнал высшей нервной деятельности, 2005, том 55(1), стр. 123-132
- Михайлова Е. С., Славуцкая А. В., Конышев В. А., Шевелев И. А., Шараев Г. А. — Вызванные потенциалы мозга человека на изображения полосок и крестообразных фигур // Журн. высшей нервной деятельности, 2006, том 56 (1), стр. 27-30
- Михайлова Е.С., Славуцкая А. В., Конышев В. А., Пирогов Ю. А., Анисимов Н. В., Шевелев И. А. — Локализация диполей волны Р1 зрительного вызванного потенциала мозга человека. Доклады Российской академии наук, 2006, том 409(5), стр. 1-5
- Карловский Д.В., Конышев В. А., Селищев С.В. — Нейрокомпьютерный интерфейс на основе Р300 // Медицинская техника, 2007, № 1, стр. 28-32
- Конышев В.А., Карловский Д.В., Михайлова Е.С., Славуцкая А.В., Авдейчик В.Г., Шмелев А.С., Шевелев И.А. Исследование опознания задуманных букв и слов по волне Р300 вызванного потенциала мозга человека с помощью нейрокомпьютерного интерфейса // Российский физиологический журнал им. И.М. Сеченова., 2007, том 93, № 2, стр. 141-149
- Karlovskiy D.V., Konyshev V.A. — VisualMind Framework for Brain-Computer Interface development // 3rd Russian-Bavarian Conference on Biomedical Engineering at Friedrich-Alexander-University Erlangen-Nuremberg and Fraunhofer Institute for Integrated Circuits IIS Erlangen, Bavaria, 2007, pp 15-18
- Shevelev I.A., Mikhailova E.S., Chicherov V.A., Konishev V.A., Karlovskiy D.V. Spatial gradient of P300 in the brain-computer-interface paradigm // International Journal of Psychophysiology, 2008, pp. 181
- Конышев Д.В., Ющенко А.С. — Управление мимикой антропоморфных роботов // Экстремальная робототехника, 2014, том 1, № 1, стр. 331-340
- Бобе А.С., Конышев Д.В., Воротников С.А. Система распознавания базовых эмоций на основе анализа двигательных единиц лица // Инженерный журнал: наука и инновации, 2016, № 9 (57)
- Bobe,A., Alekseev A., Komarova M., Fastovets D. Single-trial ERP Feature Extraction and Classification for Visual Object Recognition Task // 2018 Engineering and Telecommunication (EnT-MIPT)
- Bobe A., Nagapetian A., Rashkov G.. Application of generative models for implementing the brain-computer interface // En&T 2018
- А.В. Бахчина, S.J. Laukka, С.Б. Парин, В.В. Гаврилов, Динамика стресс-активации при повторении стрессогенного воздействия в эксперименте // Современные технологии в медицине, 2019, том 11, № 1, стр. 155-162
- Bobe A., Fastovets D., Rashkov G., Komarova M. Portal — A user-friendly environment for BCI models training // IEEE: 2019 Engineering and Telecommunication (EnT-MIPT)
§ 9. Награды
- Cybathlon 2016 — 4 место в категории BCI
- Cybathlon 2016 — 7 место в категории Exoskeleton Race
- Cybathlon 2021 — 2 место в категории BCI
- Благодарность от лица Образовательного центра «Сириус» за подготовку цикла «Уроки настоящих нейротехнологий»
- Награда «Технопрорыв года — 2021» от специального представителя Президента РФ по вопросам цифрового и технологического развития Дмитрия Пескова «За достижение значительных результатов в развитии отечественной науки и технологического бизнеса»